





Para o efeito, este projeto ‘Quem Quer Ser um Carro Autónomo’ recorre a uma série de elementos tecnológicos que estão a ser desenvolvidos para utilização em carros autónomos reais com vista ao lançamento de um “sistema operativo para a mobilidade urbana” no futuro.
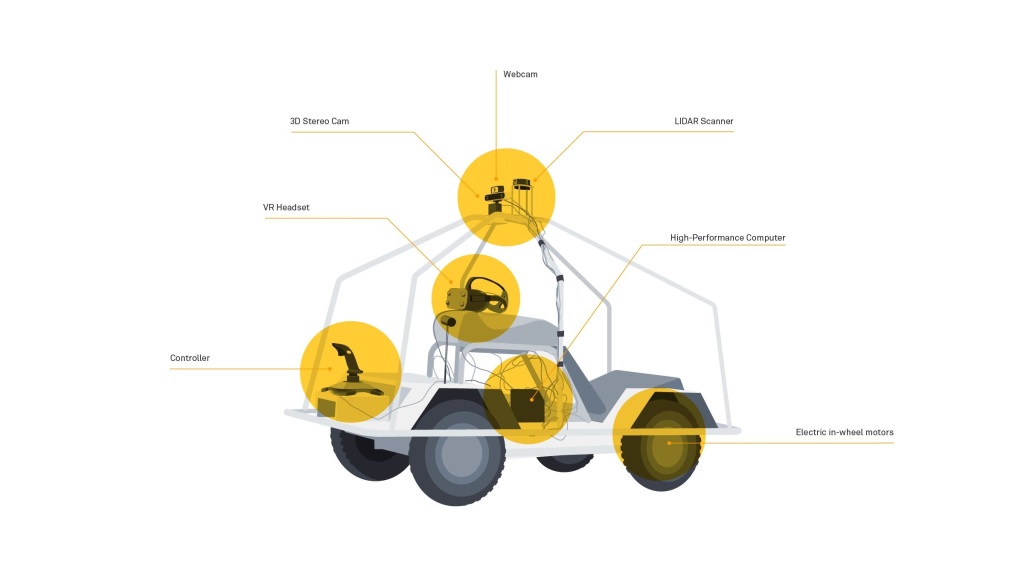
Com a moovel focada em quatro áreas importantes para o futuro dos transportes – ‘Conectividade’, ‘Partilha e Serviços’, ‘Elétrico’ e ‘Autónomo’ –, é no capítulo dos transportes sem condutor que reside o projeto de ‘Quem Quer Ser um Carro Autónomo’, que propõe um veículo não convencional especialmente construído para o efeito que surge equipado com uma câmara 3D, scanner LIDAR e sensores diversos que passam a sua informação a uns óculos de realidade virtual que os condutores poderão utilizar a bordo deste modelo para ficarem a conhecer o que é um carro autónomo na primeira pessoa (literalmente).
O veículo é dirigido pelo utilizador com recurso a esses mesmos óculos virtuais, tirando partido do mapa tridimensional e objetos reconhecidos pelo sistema para assim conseguir ‘controlar’ o pequeno carro, assumindo dessa forma o papel da unidade eletrónica de controlo desta pequena ‘gerigonça’.
Ou seja, na prática, este veículo não é autónomo, uma vez que a tomada de decisões é feita pelo humano e não por um sistema de comando eletrónico. O pequeno carro de aspeto estranho consiste numa plataforma com motores elétricos e sensores, com um dispositivo de controlo a servir para manobrar a direção, acelerar e travar. Para o condutor fica reservada a posição estranha de ir deitado de barriga para baixo mas com a cara orientada no sentido da marcha que, de acordo com a Daimler, “melhora o sentido de movimentos do condutor e permite a total imersão na perceção” desta experiência.
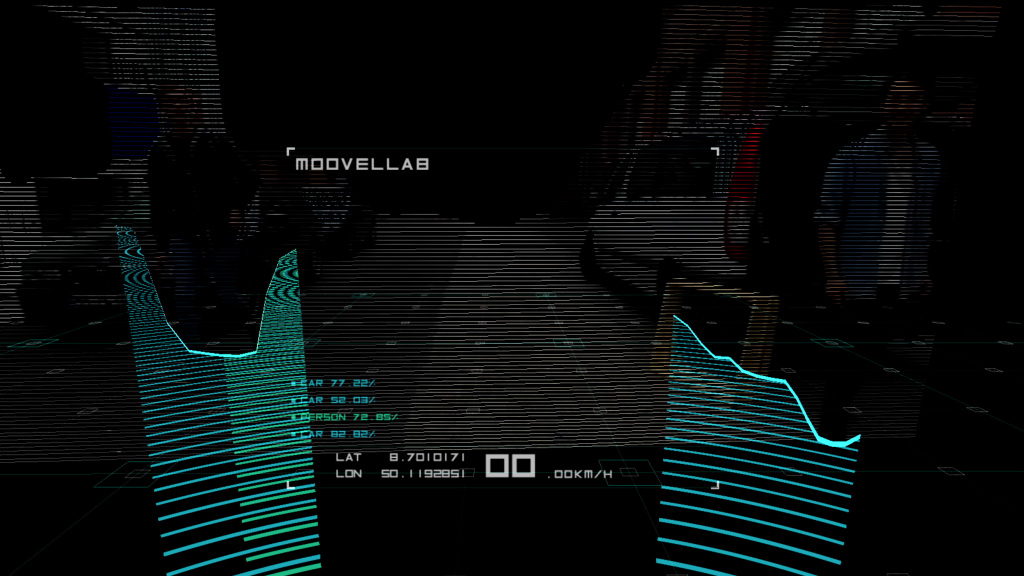
Como funciona?O controlo por via dos óculos de realidade virtual tem por base dois tipos de sensores. A visão principal é dada por uma câmara de profundidade 3D que mostra o terreno em tempo real. A imagem da câmara 3D é complementada, depois, pelo reconhecimento de objetos em redor do veículo, fornecendo assim ao ‘condutor’ a informação dos objetos que são reconhecidos pelo computador. Por fim, um sensor LIDAR (LIght Detection And Ranging) providencia uma dimensão adicional em termos de medição de distâncias. Todos estes dados são depois compilados e oferecidos ao ‘condutor’ em formato de ambiente virtual para que este possa orientar o veículo.
A moovel vai apresentar esta experiência a todo os interessados em duas conferências, uma já nos dias 20 e 21 de outubro na Push UX em Munique, na Alemanha, e a outra entre os dias 2 e 4 de novembro no Festival de Cultura Digital e Criativa KIKK Festival, em Namur, na Bélgica.
Percorra a galeria de imagens acima clicando sobre as setas.


