




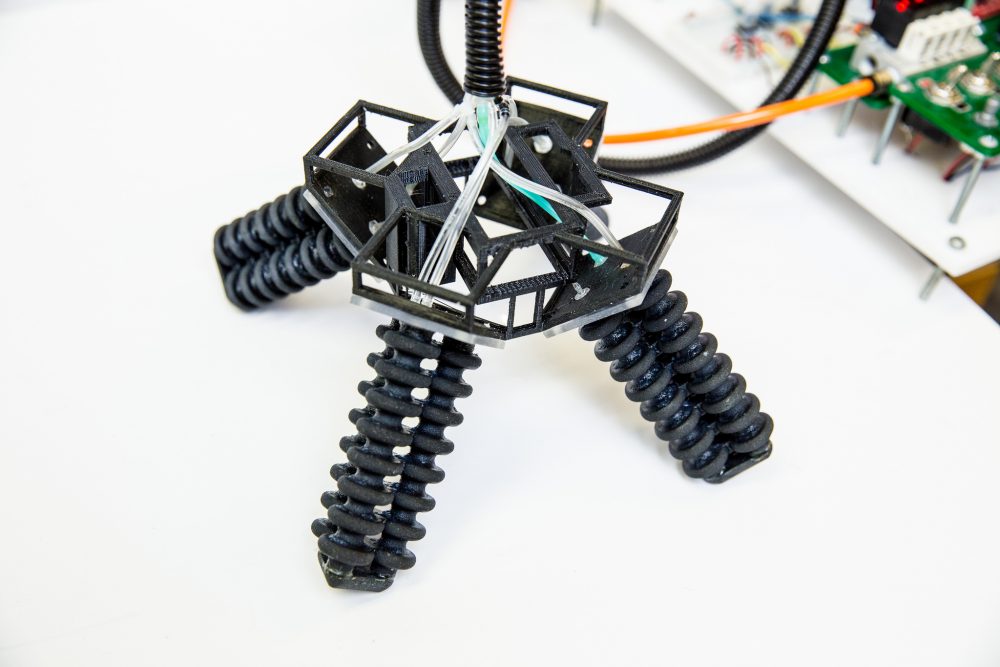





O robô é a parte menos importante deste projeto de engenharia da Escola Jacobs, um ramo da Universidade da Califórnia/San Diego. Para que o robô funcionasse e fosse fácil de construir, foi necessário criar uma nova tecnologia de impressão 3D, que possa incorporar de uma só vez peças rígidas e macias com o mesmo material de origem. E conseguiram fazer isso com as pernas do robô.
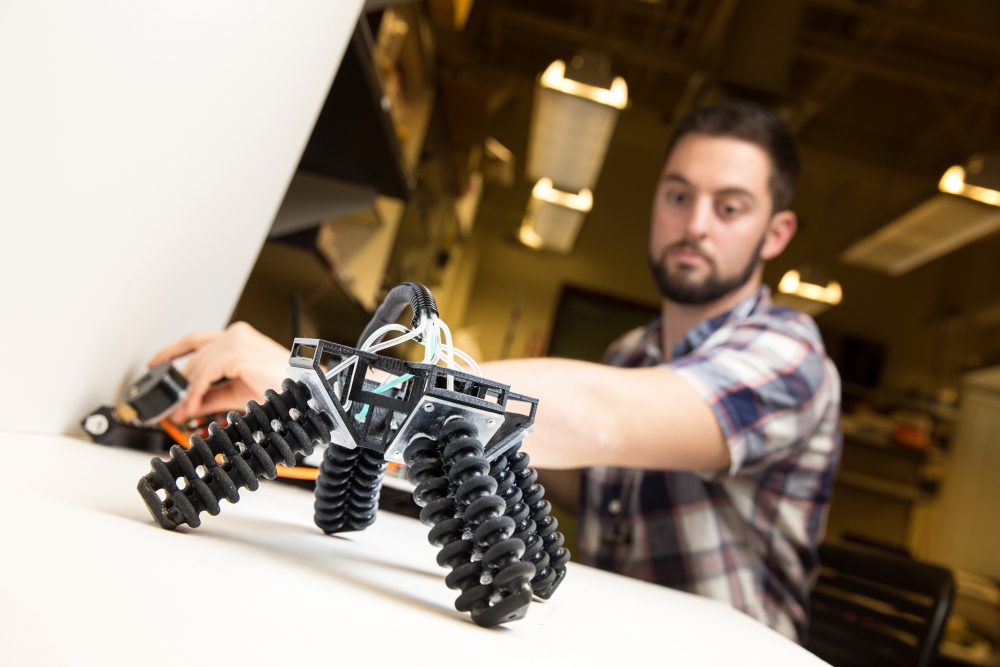
Basicamente, este pequeno aranhiço mecânico tem quatro patas, cada uma com três câmaras de ar separadas, que podem ser cheias separadamente. É conforme cada uma das câmaras está cheia que o robô consegue locomover-se, adaptando-se ainda às características do terreno, podendo escalar superfícies íngremes ou caminhar em areia e pedras sem ficar preso.
A parte eletrónica do robô usa um processador com código open source, pelo que pode ser modificado ou melhorado por qualquer pessoa que esteja utilizada em usar esta tecnologia. No entanto, tanto o processador como a bomba de ar são pesados e impedem o robô de se locomover sem estar ligado diretamente a uma fonte de energia. A equipa de engenheiros vai agora agora dedicar-se a miniaturizar estes componentes.
Percorra a galeria de imagens acima clicando sobre as setas.


